TacCap Sensor Design
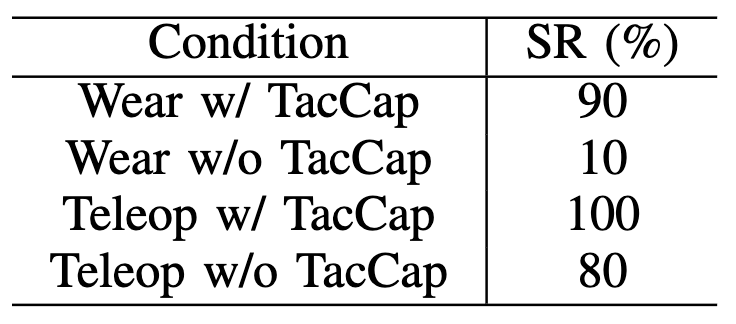
TacCap is based on fiber Bragg grating (FBG) technology, which is inherently resistant to environmental factors such as light, water, and magnetic fields. FBGs function as highly sensitive optical strain gauges, capable of resolving strains as small as 10-5. When strain is applied to the FBGs, it induces shifts in the reflected optical wavelengths, as shown in the figure below. Additionally, FBG technology allows multiple sensors to be integrated along a single optical fiber, each tuned to a different nominal wavelength. This configuration simplifies wiring while enabling the system to sample dozens of FBGs at rates of up to 2 kHz.
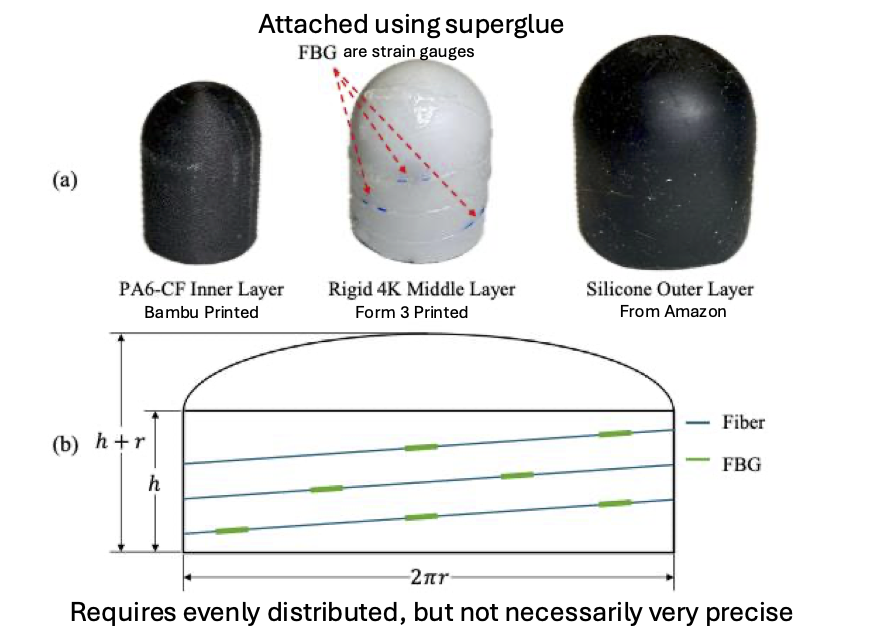
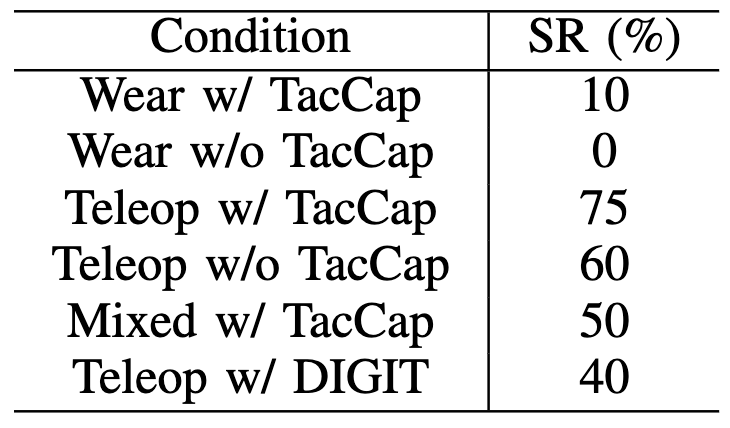
Finite element analysis (FEA) of a single‑point contact shows that strain is greatest near the applied force and decays with distance, confirming the locality of the sensor response. Guided by these results, we adopt a pseudo‑uniform spiral layout in which successive FBGs are evenly spaced along the axial direction.
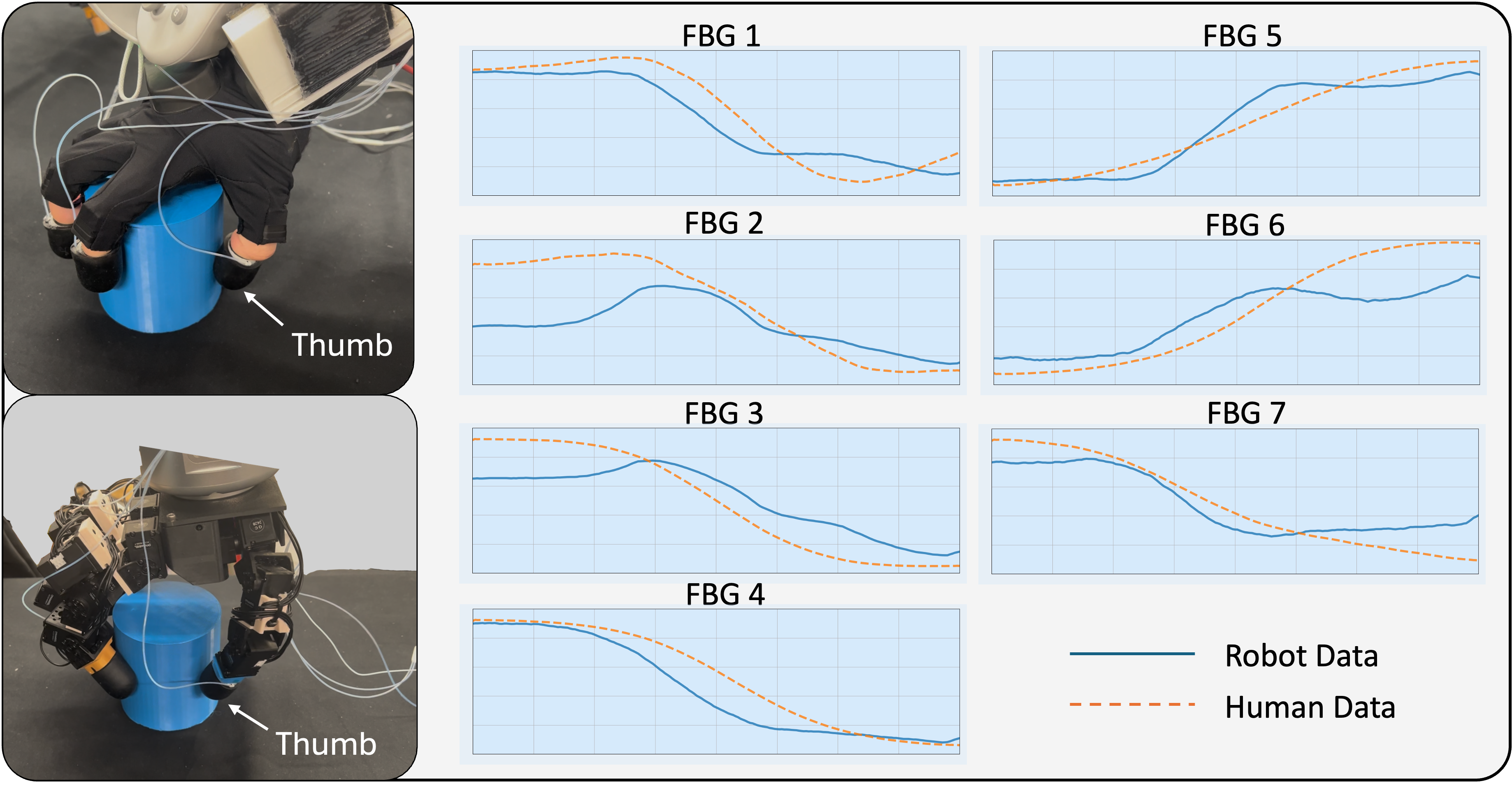
We employ a three‑layer construction: an inner stiff layer that prevents finger squeezing of the TacCap, a middle layer that sensing strain with FBGs, and an outer compliant layer. This architecture yields a minimal human‑to‑robot transfer gap, as illustrated by the TacCap thumb signals shown below.